
MicroPython: Loron ve Cellron Kartları ile HC-SR04 Ultrasonik Sensör
Bu kısımda, MicroPython ürün yazılımını kullanarak bir nesneye olan mesafeyi elde etmek için Loron ve Cellron kartları ile HC-SR04 Ultrasonik Sensörün nasıl kullanılacağını öğreneceksiniz. Bu eğitim, sensörün Loron ve Cellron kartlarını nasıl bağlanacağını kapsar ve bir nesneye olan mesafeyi almak ve görüntülemek için basit bir MicroPython komut dosyası sağlar.
Önkoşullar
Bu öğreticiyi takip etmek için kartlarımızda kurulu MicroPython ürün yazılımına ihtiyacınız var. Ayrıca kodu yazıp kartınıza yüklemek için bir IDE’ye ihtiyacınız var. Thonny IDE’sini kullanmanızı öneririz:
Thonny IDE’sini indirmek için gerekli bilgiler sitemizin doküman kısmından Windows ve MacOS için bulunmaktadır.
HC-SR04 Ultrasonik Sensör Tanıtımı
HC-SR04 ultrasonik sensör, bir nesneye olan mesafeyi belirlemek için sonar kullanır. Bu sensör, çoğu hobi projesi için iyi olan 0,3 cm (0,1 inç) doğrulukla 2 cm’den 400 cm’ye (0,8 inç ila 157 inç) okur. Ayrıca bu özel modül, ultrasonik verici ve alıcı modülleri ile birlikte gelir.
Aşağıdaki resim HC-SR04 ultrasonik sensörün ön ve arka yüzü gösterilmektedir.
HC-SR04 Ultrasonik Sensör Teknik Verileri
Aşağıdaki tablo, HC-SR04 ultrasonik sensörün temel özelliklerini ve teknik özelliklerini göstermektedir.
| Güç Kaynağı | 5V DC |
| Çalışma Akımı | 15 mA |
| Çalışma Frekansı | 40 kHz |
| Maksimum Mesafe | 4 m |
| Minimum Menzil | 2 cm |
| Ölçüm Açısı | 15º |
| Trigger Giriş Sinyali | 10us TTL darbesi(pulse) |
| Echo Çıkış Sinyali | Mesafe aralığıyla orantılı TTL darbesi |
| Boyutlar | 45mm x 20mm x 15mm |
HC-SR04 Ultrasonik Sensör Çıkışı
| VCC | Sensöre güç sağlar (5V) |
| Trig | Trigger Giriş Pini |
| Echo | Echo Çıkış Pini |
| GND | Ortak GND |
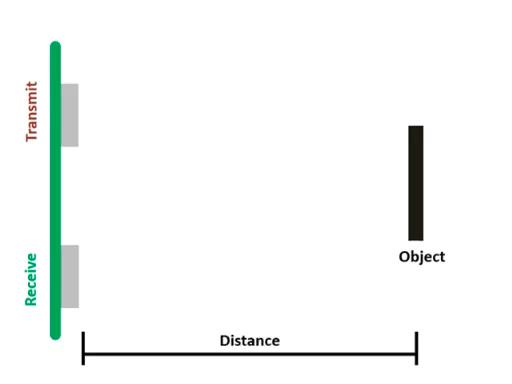
HC-SR04 Ultrasonik Sensör Nasıl Çalışır?
Ultrasonik sensör, bir nesneye olan mesafeyi belirlemek için sonar kullanır. İşte nasıl çalıştığı:
Ultrason vericisi (trig pini) yüksek frekanslı bir ses (40 kHz) yayar.
Ses havada yayılır. Bir nesne bulursa, modüle geri döner.
Ultrason alıcısı (echo pini) yansıyan sesi (yankı) alır.
ÇEVRE BİRİMLERİ
Sesin havadaki hızını ve seyahat süresini (sinyalin iletilmesinden ve alınmasından bu yana geçen süre) dikkate alarak bir nesneye olan mesafeyi hesaplayabiliriz. İşte formül:
| Bir cisme olan uzaklık = ((Havadaki sesin hızı)*Zaman)/2 |
| 20ºC’de (68ºF) havadaki ses hızı = 343m/s |
Gerekli Parçalar
Bu öğreticiyi tamamlamak için aşağıdaki parçalara ihtiyacınız var:
- HC-SR04 Ultrasonik Sensör
- Loron ya da Cellron kartı
- Breadboard
Atlama telleri (Jumper wires)
Şematik
HC-SR04 ultrasonik sensörü aşağıdaki şematik diyagramda gösterildiği gibi kartınıza bağlayın. Trig pinini GPIO 5’e ve Echo pinini GPIO 18’e bağlıyoruz, ancak başka uygun pinleri de kullanabilirsiniz.
| Ultrasonik sensör | Loron yada Cellron |
| VCC | VIN |
| Trig | GPIO 5 |
| Echo | GPIO 18 |
| GND | GND |
HC-SR04 MicroPython Kütüphanesi
MicroPython aygıt yazılımını kullanarak HC-SR04 ve Loron/Cellron kartlarını kullanarak bir nesneye olan mesafeyi elde etmenin birden çok yolu vardır. Sensörle arayüz oluşturmayı ve ölçüm almayı kolaylaştıran bu HC-SR04 MicroPython Kütüphanesini kullanacağız.
Kullanacağımız kitaplık, varsayılan olarak standart MicroPython kitaplığının bir parçası değildir. Bu nedenle, aşağıdaki kitaplığı kartınıza yüklemeniz gerekir (hcsr04.py adıyla kaydedin).
https://github.com/rsc1975/micropython-hcsr04 bu linkten HC-SR04 MicroPython Kütüphanesine ulaşabilirsiniz.
Kullanmakta olduğunuz Thonny IDE’si için bir sonraki aşamayı izleyin:
Bir sonraki bölüme geçmeden önce, kartınıza MicroPython belleniminin yüklendiğinden emin olun. Sonraki eğitimlerden birini takip edebilirsiniz:
BURAYA PORT YÜKLEMEYİ ANLAT
Thonny IDE ile HC-SR04 kitaplığını yükleyin
- Kitaplık kodunu yeni bir dosyaya kopyalayın. HC-SR04 kitaplık kodu burada bulunabilir. (https://github.com/rsc1975/micropython-hcsr04)
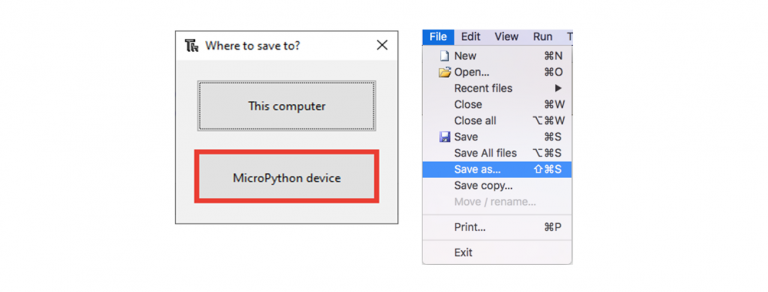
- Dosya > Farklı kaydet… seçeneğine gidin.
- “MicroPython cihazına” kaydetmeyi seçin:
4. Dosyanızı hcsr04.py olarak adlandırın ve Tamam düğmesine basın:
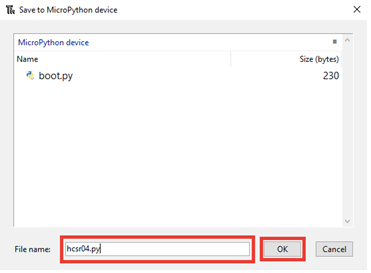
Ve bu kadar. Kitaplık panonuza yüklendi. Başarıyla yüklendiğinden emin olmak için Dosya > Farklı kaydet seçeneğine gidin ve MicroPython aygıtını seçin. Dosyanız orada listelenmelidir:
Kütüphaneyi panonuza yükledikten sonra kütüphaneyi import ederek kodunuzdaki kütüphane fonksiyonlarını kullanabilirsiniz.
Kod
Kitaplığı ESP32 veya ESP8266’ya yükledikten sonra aşağıdaki kodu main.py veya boot.py dosyasına kopyalayın. Her saniye en yakın nesneye olan mesafeyi yazdırır.
# Öncelikle gerekli kitaplıkları içe aktarmanız gerekir: #hcsr04 kütüphanesinden HCSR04 sınıfını içe aktarın. #Ayrıca kodumuza gecikmeler eklemek için time kütüphanesini de içe aktarmanız gerekir. from hcsr04 import HCSR04 from time import sleep #Ardından, HCSR04 sensörüne atıfta bulunan sensör adlı bir HCSR04 nesnesi oluşturun. #trigger pimini, echo pimini ve zaman aşımını(timeout) bağımsız değişken olarak iletin. sensor=HCSR04(trigger_pin=5, echo_pin=18, echo_timeout_us=10000) while True: #Mesafeyi cm cinsinden elde etmek için sensör nesnesindeki mesafe_cm yöntemini çağırmanız yeterlidir. #Sonucu mesafe değişkenine kaydedin. distance = sensor.distance_cm() #Mesafeyi Micropython shell’e yazdırın. print(‘Distance:’, distance, ‘cm’) #Sonunda, bir saniyelik bir gecikme ekleriz (mesafe her saniye güncellenir): sleep(1)
Kodu kartınıza yükledikten sonra kodu çalıştırmak için Run düğmesine basın. En yakın nesneye olan mesafe yazdırılacaktır.
Teşekkür Ederiz.